1. Set all trims and sub-trims to 0. Unlike typical receiver, you do not use trim to center servo or trim out the helicopter with this receiver.
2. Turn on helicopter, turn off stabilization dip switch so gyro does not move servo around.. Set swash plate to be 90 degree with main shaft with rodends.
3.At 0 pitch, the aluminum tracking arms should be horizontal. These are the arms that tracks the swash plate to the rotor. That way, you get equal travel up or down, and those small arm runs out of travel fast.
4. Fly helicopter. If it drifts to one side, adjust rod end on the swash plate to tilt it to the opposite direction of the drift to center helicopter. Note that rodend only goes in one way, so adjustment increment is 1 turn.
5. When rodend can't adjust anymore, use radio trim for fine adjustment.
6. Trim setting take change only at helicopter start-up. Therefore, make trim changes, but to see the real effect of the trim, you have to disconnect power to helicopter to shut down helicopter, and connect again.. You can leave the radio on.
7. Now, this is a very strange thing. On the V120D2, Up trim on elevator is down on helicopter. Down is up. So if helicopter wants to go forward, instead of giving it up trim, need to give it down trim. Down trim on a normal helicopter would make the helicopter go forward more, but on this one, it corrects it.
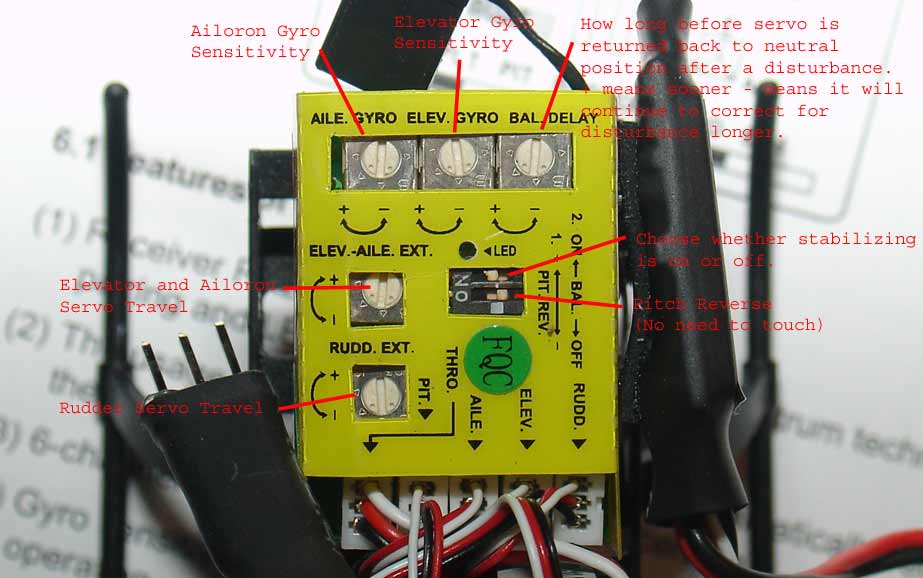
First thing to do after getting the V120D02 is to take the speed control that is on the right side of the receiver, remove it and put it on the left side. If you remove it carefully, you can reuse the double sided tape. The gyro is on the right side of the receiver, and when speed control heats up, it mess up the gyro setting, and cause a crash. Took a long time for various people on the forum to figure that one out.
The 2801 Pro radio allow you to set the throttle and pitch curve. Question is what is the pitch and throttle curve for max flying time and for max power.
Time for some experimentation. Tie the helicopter down to a gram scale. Latter on, some foam was used between helicopter and the scale to take out some resonance issue. Power supply is a constant 4.1V.

After setting the helicopter at various pitch and throttle, a chart is generated.
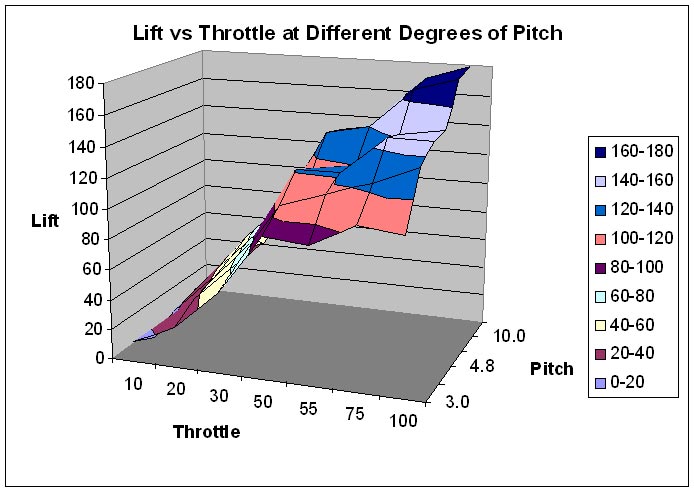
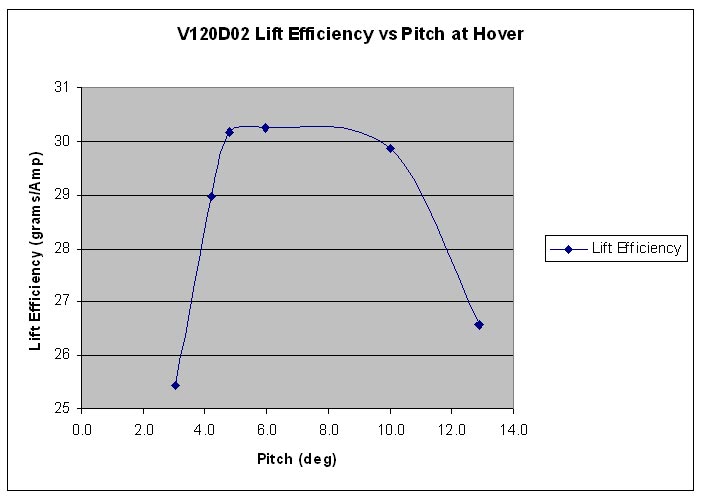
Above chart is too much information. Got to reduce the data. I want maximum batter time during hover. Did a chart of lift per amp of current versus pitch. From here, you can see maximum efficiency is between 4 to 10 degrees of pitch. I will use 7 degrees to be in the sweet spot of max efficiency for longest run time.
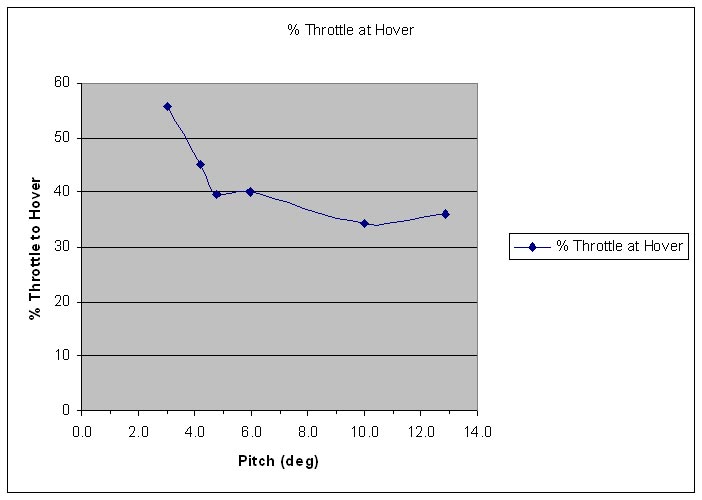
I know 7 degree of pitch is best, what position should the throttle be at to hover the helicopter at 7 degree of pitch? Here you see at 7 deg of pitch, throttle needs to be at 37%.
First set point: At 37% throttle, pitch should be at 7 degree. On mine, 50% pitch on the transmitter is 0 deg pitch. 7 degree of pitch is equivalent to 67% pitch.
Therefore: For hover, 37% throttle and 67% pitch.
What about max power. What is the best pitch? Here you see 12.9 degree of pitch gives the max lift. BTW, 12.9 degree of pitch just about use up all the travel on the tracking arms. During testing, the arms bent backward, so is not really usable.
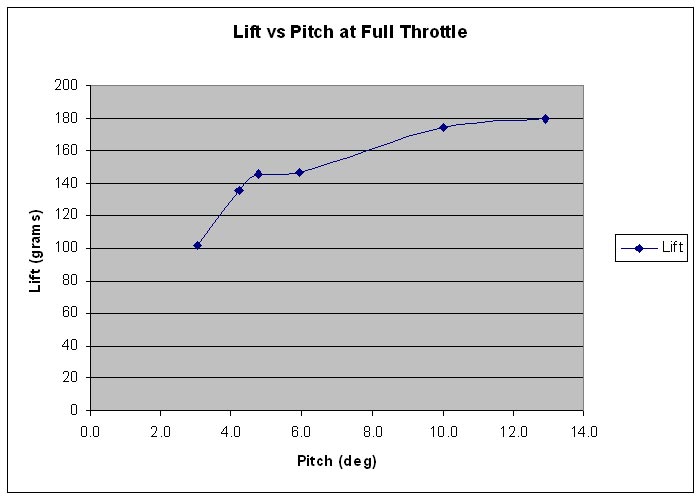
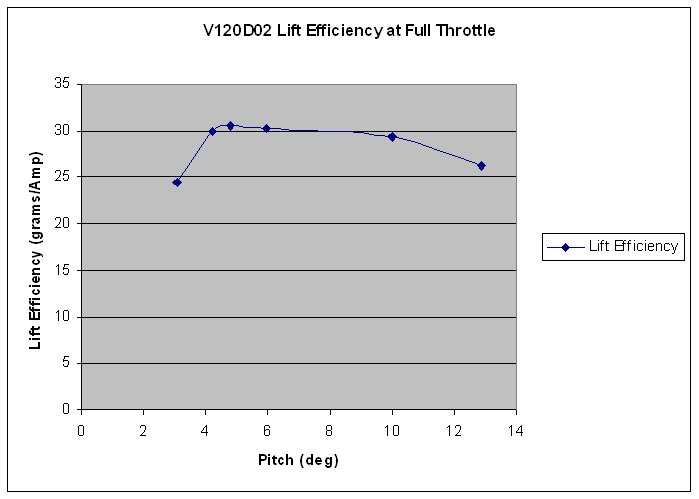
What about efficiency at full throttle? Here you see efficiency drops off rapidly after 10 degree of pitch. In the above chart, between 10 and 12.9 degree of pitch, you only gain an additional 5 grams of lift, or just 3% more. Not worth the 11% drop in efficiency in the above chart.
Therefore, best compromise is 10 degree pitch at 100% throttle.
On mine: 100% throttle at 72% pitch. (50% pitch on radio is 0 deg pitch on heli)
Pitch curve conclusion:
Have these 2 points on the pitch curve:
Weight of helicopter: 77.1g no battery
94.3 w/ 650mah battery.
Other Hints:
If the tail boom cracks, it will be making funny vibrations. Get them here, or get stock Walkera.
Get cheap simulated carbon fiber foam blade off ebay.
Slipper clutch mod here.
HM-M120D01-Z-29 - RX2616V - Very old receiver, for 2801 transmitter. Used on 4G6 and other older birds. Throttle pitch is adjusted on the receiver - Obsolete.
HM-V120D02-Z-12 - RX2610V - Old receiver for the old 2801 transmitter. (Not for DEVO transmitter). Used on original V120D02 (Not the S version)
HM-V120D02S-Z-26 - RX2622 V - For 2801 transmitter. - 3 axis. Used in V120D02S
HM-V120D02S-Z-25 - RX2622V-D - For DEVO - 3 axis. Used in V120D02S
V120D02S-Z-02 - RX2636H-D - for DEVO - 6 axis gyro instead of 3 axis. Used in the latest V120D02S Version 2 - Comments on this receiver range from very stable to cannot do 3D. Depends on how is adjusted, it can do 3D and be stable at the same time.